
- Accueil
- Utilisation des données de position (Carte)
- Utilisation des journaux de position
- Configuration des paramètres d'application des journaux de position
Fonts size
- S
- M
- L
Configuration des paramètres d'application des journaux de position
L’écran de réglage s’affiche lorsque vous cliquez sur  dans la Barre d’outils et sélectionnez [Log Matching].
dans la Barre d’outils et sélectionnez [Log Matching].
dans la Barre d’outils et sélectionnez [Log Matching].Vous pouvez régler le fuseau horaire dans lequel une image a été prise et choisir la méthode d’assignation des informations de localisation de la prise de vue pour cette image.
Une fois les modifications effectuées, cliquez sur [OK] pour les appliquer.
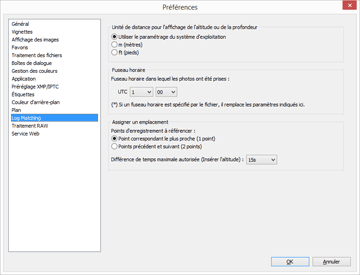
Éléments de l’écran de réglage
Unité de distance pour l'affichage de l'altitude ou de la profondeur
Il est possible de sélectionner l’unité utilisée sur la carte.
- [Utiliser le paramétrage du système d'exploitation] est sélectionné par défaut.
- Vous pouvez sélectionner [m (mètres)] ou [ft (pieds)] comme unité de la zone du graphique d’altitude (baromètre)/profondeur. Cette sélection affecte l’unité affichée sur le graphique. L’unité d’origine demeure inchangée dans les journaux de sortie proprement dits.
Fuseau horaire
Fuseau horaire de la prise de vue des images :
Cliquez sur  pour régler les différences d’heures entre le temps universel coordonné (UTC) et le fuseau horaire du lieu de prise de vue.
pour régler les différences d’heures entre le temps universel coordonné (UTC) et le fuseau horaire du lieu de prise de vue.
pour régler les différences d’heures entre le temps universel coordonné (UTC) et le fuseau horaire du lieu de prise de vue.- Par défaut, le fuseau horaire est réglé en fonction de [Date et heure] / [Fuseau horaire] sous Windows et [Date et heure] / [Fuseau horaire] sous Mac OS.
- Vous pouvez vérifier à quel fuseau horaire appartient le lieu de prise de vue en consultant les paramètres de l’écran du SE.
- Lorsque [Fuseau horaire] est incorporé parmi les métadonnées de l’image, le fuseau horaire défini pour [Fuseau horaire] est appliqué, indépendamment du paramètre de cet écran de réglage.
- [Fuseau horaire] est la métadonnée contenant des informations sur le fuseau horaire où l’image a été prise.
- Si les informations sur le [Fuseau horaire] ne sont pas incorporées parmi les métadonnées de l’image, les différences de date et heure de prise de vue réglées sur cet écran s’appliquent.
Assigner un emplacement
Dans [Points d'enregistrement à référencer :], définissez la méthode d'affectation des données de position aux images en utilisant les points de trace enregistrés dans le journal de position.
Si le journal de position contient des données d'altitude (système de navigation par satellite), ces données sont aussi affectées aux images.
[Point correspondant le plus proche (1 point)]
Les informations de localisation du point de trace correspondant le plus proche au moment où l’image a été prise s’appliquent.
[Points précédent et suivant (2 points)]
Selon les informations de localisation enregistrées pour 2 points de trace adjacents, les informations de localisation de l’image sont estimées par l’heure de sa prise de vue.
Pour plus de détails sur la méthode d’assignation, consultez « Ajout de données de position à partir du journal de position ».
- Élément connexe
- Utilisation des journaux de position